Контроллер серии S7-1500
Инновационный программируемый контроллер S7-1500 базируется на дальнейшем развитии и совершенствовании функциональных
возможностей хорошо известных программируемых контроллеров S7-300 и S7-400.
Он предназначен для автоматизации циклических процессов во всех секторах промышленного производства.
Улучшенная производительность системы, встроенная поддержка технологических функций, обмен данными через PROFINET в реальном масштабе времени в режимах RT (Real Time) и IRT (Isochronous
Real Time), языковые расширения пакета STEP 7, а также поддержка проверенных временем функций S7-300/ S7-400 гарантируют получение неоспоримых преимуществ использования нового контроллера.
В сочетании с преимуществами программного обеспечения STEP7 Professional (TIA Portal) ввод в эксплуатацию новой серии контроллеров может быть выполнен легко, просто и эффективно.
SIMATIC S7-1500-пожалуй, самый быстрый контроллер в мире!
-
Запасные части и аксессуары (15)
-
Коммуникационные модули (9)
-
Модули блоков питания (6)
-
Модули ввода аналоговых сигналов (6)
-
Модули ввода дискретных сигналов (7)
-
Модули ввода-вывода аналоговых сигналов (1)
-
Модули ввода-вывода дискретных сигналов (1)
-
Модули вывода аналоговых сигналов (4)
-
Модули вывода дискретных сигналов (10)
-
Профильные шины (6)
-
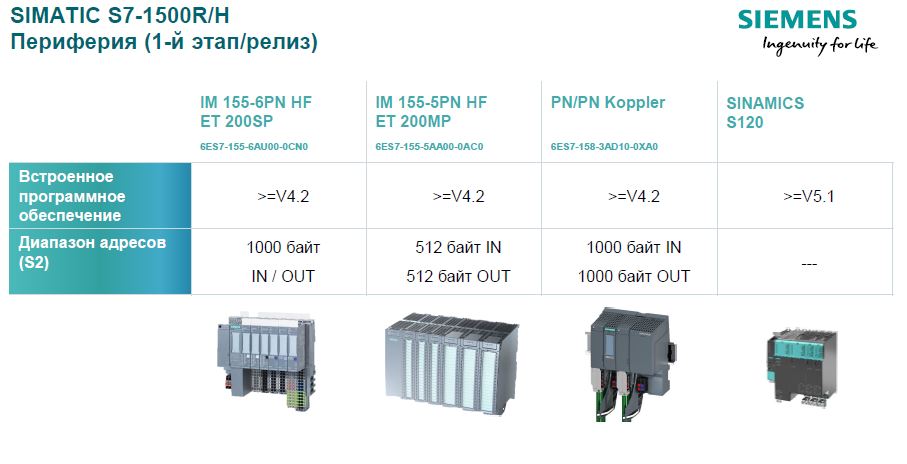
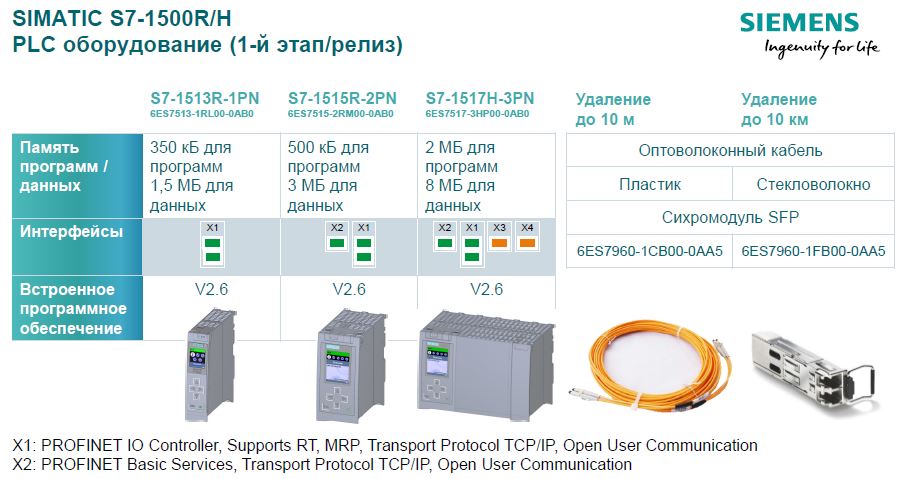
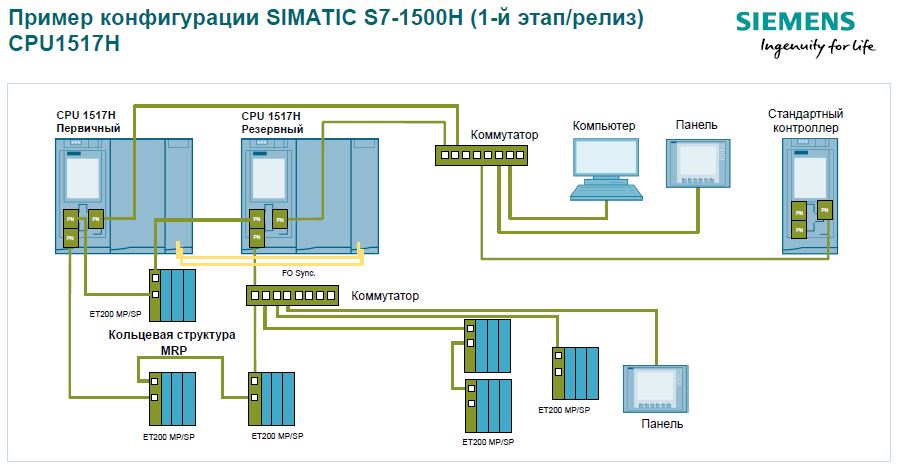
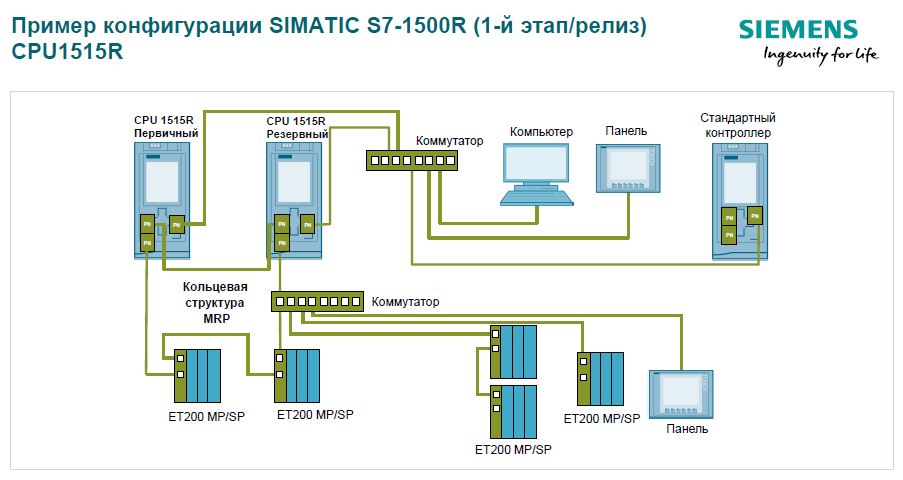
Резервированные системы S7-1500R/1500H (9)
-
Стартовые наборы (2)
-
Технологические модули (2)
-
Фронтальные штекеры (3)
-
Центральные процессоры (16)
Основные свойства нового контроллера:
• Высочайшая производительность для своего класса, эффективное
решение задач автоматизации среднего и высокого уровня сложности, минимальные времена реакции на внешние события.
• Модульная конструкция, максимальная адаптация аппаратуры к
требованиям решаемых задач, продуманные конструктивные решения и работа с естественным охлаждением.
• Одновременное обслуживание систем локального и распределенного ввода-вывода, простое включение в сетевые конфигурации,
встроенная поддержка защищенного обмена данными через промышленные сети Industrial Ethernet и интернет.
• Расширенная концепция защиты доступа к программе и данным.
• Поддержка широкого спектра диагностических функций и общей
концепции диагностики систем локального и распределенного
ввода-вывода.
• Свободное наращивание функциональных возможностей при модернизации системы управления.
Области применения:
Промышленный контроллер SIMATIC S7-1500 может использоваться во всех областях, где традиционно находят применение программируемые контроллеры S7-300, а также в целом ряде областей, где в настоящее время находят применение программируемые контроллеры S7-400.
Состав аппаратуры и конструктивные особенности:
Программируемые контроллеры S7-1500 позволяют использовать в своем составе:
• Модули центральных процессоров (CPU) различной производительности, стандартного или специализированного назначения.
• Сигнальные модули (SM), предназначенные для ввода и вывода
дискретных и аналоговых сигналов контроллера.
• Коммуникационные модули (CM/CP) для подключения контроллера к сетям PROFINET и PROFIBUS, а также поддержки обмена данными через непосредственные (PtP – point to point) соединения на
основе последовательных интерфейсов RS 232 и RS 422/ RS 485.
• Технологические модули (TM) для решения задач скоростного
счета, позиционирования, взвешивания и т.д.
• Блоки питания нагрузки PM 1507 для питания внешних цепей и системные блоки питания (PS 150x) для питания внутренней электроники модулей контроллера.
Программируемые контроллеры S7-1500 позволяют использовать в своем составе:
• Модули центральных процессоров (CPU) различной производительности, стандартного или специализированного назначения.
• Сигнальные модули (SM), предназначенные для ввода и вывода дискретных и аналоговых сигналов контроллера.
• Коммуникационные модули (CM/CP) для подключения контроллера к сетям PROFINET и PROFIBUS, а также поддержки обмена данными через непосредственные (PtP – point to point) соединения на основе последовательных интерфейсов RS 232 и RS 422/ RS 485.
• Технологические модули (TM) для решения задач скоростного счета, позиционирования, взвешивания и т.д.
• Блоки питания нагрузки PM 1507 для питания внешних цепей и системные блоки питания (PS 150x) для питания внутренней электроники модулей контроллера.
Модули контроллера делятся на четыре класса:
• Модули класса HF с поддержкой диагностических функций на уровне отдельных каналов в модулях SM и TM и расширенным набором поддерживаемых функций в модулях CM и CP.
• Модули класса ST с поддержкой диагностических функций на уровне модуля или группы каналов.
• Модули класса BA без поддержки диагностических функций.
• Модули класса HS с поддержкой функций скоростного ввода и вывода дискретных и аналоговых сигналов.
Конструкция контроллера отличается высокой гибкостью и удобством обслуживания. Все модули устанавливаются на профильную шину S7-1500 и фиксируются в рабочих положениях встроенными в них винтами. В одну монтажную стойку допускается установка одного центрального процессора и до 31 модуля с интерфейсом подключения к внутренней шине контролера. Порядок размещения модулей может быть произвольным.
При необходимости в качестве стоек расширения можно использовать станции ET 200MP, подключаемые к контроллеру через интерфейс PROFINET.
Объединение модулей в единую систему выполняется с помощью U-образных шинных соединителей, устанавливаемых на тыльную часть корпуса. Эти соединители входят в комплект поставки каждого модуля.
Внешние цепи сигнальных модулей подключаются через съемные фронтальные штекеры, механическое кодирование которых исключает возможность возникновения ошибок при замене модулей.
Дополнительно для этой цели в модулях шириной 35 мм могут использоваться модульные и гибкие соединители SIMATIC TOP Connect.
Во всех технологических и сигнальных модулях шириной 35 мм используются одинаковые 40-полюсные фронтальные штекеры, которые должны заказываться отдельно. Сигнальные модули шириной
25 мм поставляются в комплекте с фронтальным штекером.
С помощью системных блоков питания PS 150x все модули контроллера могут быть разбиты на несколько потенциальных групп, каждая из которых имеет общие шины питания внутренней электроники. В одном контроллере S7-1500 может быть использовано до трех системных блоков питания.
Обзор контроллера SIMATIC S7-1500 T всё что нужно для производственных машин и роботов! :
Всем известны основные возможности мощных контроллеров S7-1500, вот некоторые из них:
Высокая производительность
• Высокая производительность и качество продукции благодаря быстрой системной шине и короткому времени реакции
• Точность в микросекундном диапазоне и детерминированная характеристика в функции времени с PROFINET
Простая диагностика
• Быстрое автоматическое обнаружение ошибок на системном и прикладном уровне
• Простая локализация ошибок на месте благодаря расположению светодиодов и каналов на одной линии
Эффективный инжиниринг
Поддержка всех языков программирования МЭК 61131-3 (LAD/FBD, STL, SCL, Graph) и таких языков высокого уровня, как C/C++ (только для CPU 1518(F)-4 PN/DP MFP и CPU1515SP PC2 (F/T/TF) через SIMATIC ODK 1500S)
Кибербезопасность
• Встроенная защита от копирования и защита ноу-хау для безопасного использования интеллектуальной собственности
• Усиленная защита от взлома
Safety Integrated
• Один контроллер для стандартных и отказобезопасных функций
• Многоканальные отказобезопасные модули ввода-вывода с прямой адресацией в системе технических разработок
И вот семейство контроллеров S7-1500 пополнилось новым процессорным модулем S7-1500T с расширенными технологическими функциями.
Дополнительные технологические функции управления перемещением доступны с TIA Portal версии 15 и FW версии V2.5 :
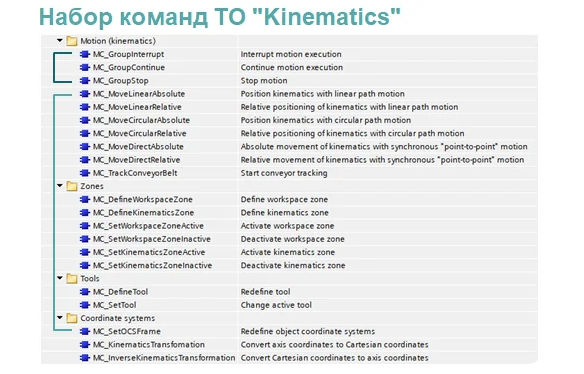
Функции управления перемещением
• Кинематические функции управления кинематическими
системами максимально с 4 интерполируемыми осями
• Синхронный редуктор и кулачковый синхронный ход
- С задачей синхронной позиции ведущей и ведомой оси
- Соединение по заданному значению
- Соединение по фактическому значению с экстраполяцией
Встроенные программы для редактирования и просмотра
• Редактор кулачков
• Конфигуратор для кинематики / трассировка кинематики
Встроенный веб-сервер
• Диагностические страницы для управления перемещением
Доступна реализация и для SIMATIC ET200SP на CPU 1515SP PC2 T/TF :
Основная функциональность:
• Встроенная операционная система Windows, полная версия
• Кинематика максимально с 4 интерполируемыми осями - Простое программирование, например, набивных автоматов, сборочных устройств и манипуляторов на основе PLCopen
• SIMATIC ODK 1500S (ODK - Open Development Kit) - интеграция программ C++ , вычисление алгоритмов MATLAB, инструментарий и примеры для решения задач автоматизации
• Отказобезопасный CPU с расширенной функциональностью управления перемещением - задачи автоматизации, управления перемещением и безопасности в одном процессоре
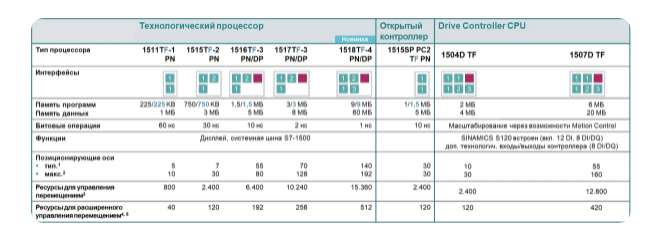
Важный момент расчёт загрузки процессора.
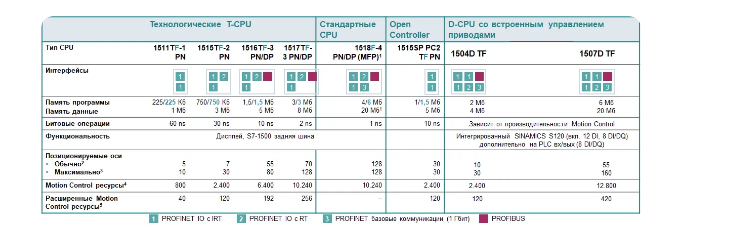
Таблица распределения функциональности в линейке CPU S7-1500/S7-1500T. ТО - это технологические объекты на основе которых рассчитывается загрузка процессора и его возможности для управления.
В таблице они указаны в двух последних строках.
При расчете необходимой производительности и применимости производительности необходимо учесть ограничения и рассчитать затрачиваемые технологические объекты обычные и расширенные!
1. 50 Мб доп. для C/C++ (PLC-RT)+500 Мб для C/C++ прилож. (RT/прилож.)
2. При 4 ms Servo/IPO цикле и 35 % загрузке CPUфункциями Motion Control
3. Другие технологические объекты не используются
4. Ресурсы для технологических объектов Motion Control: управляемая по скорости ось = 40 | Позиционируемая ось = 80 | Синхронная ось= 160 | Кулачок = 20 | Кулачковая траектория = 160 | Измерительный вход = 40
5. Ресурсы для расширенных технологических объектов Motion Control : Кулачок = 2 | Кинематические объекты= 30 | Ведущая прокси ось = 3
SIMATIC S7-1500 T-CPU
Технологический объект "Кинематика"
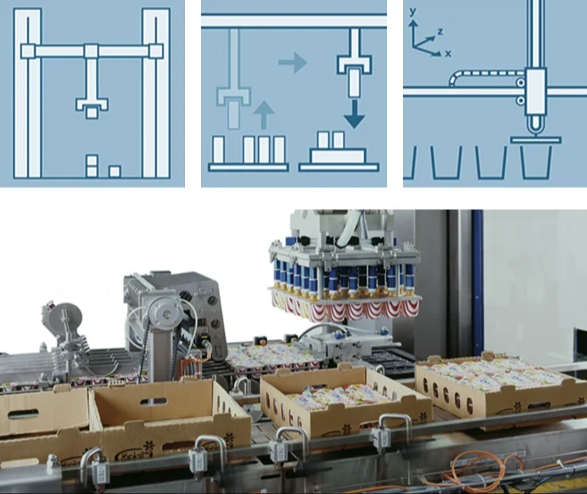
Что такое кинематическая система?
Кинематическими системами называют свободно программируемые механические системы, в которых несколько механически соединенных друг с другом осей определяют движение рабочей точки.
Использование
• Укладка на поддоны, выгрузка и загрузка
• Сборочные операции
• Последовательный монтаж
Особенность: кинематические функции в TIA Portal
• Готовые кинематические системы - эффективное программирование и автоматизация типовых кинематических систем (например, декартов портал, портал с захватом, дельта-робот, SCARA, манипулятор, трипод, цилиндрический робот)
• Определяемая пользователем кинематическая трансформация - простая интеграция собственных кинематических систем
• Функциональные блоки согласно PLCopen - программирование кинематических функций в привычной среде PLC
• До 4 интерполируемых осей - простое программирование движения X, Y, Z и ориентации инструмента
• Контроль рабочих зон - предотвращение столкновений между элементами кинематической системы и компонентами станка
• Конфигурирование с графической поддержкой - интуитивное параметрирование кинематики, систем координат, инструментов и зон
• Трассировка кинематики - диагностика движения с помощью 3D визуализации с трассировкой
Очень удобные предустановленные кинематические схемы - требуется только настройка!
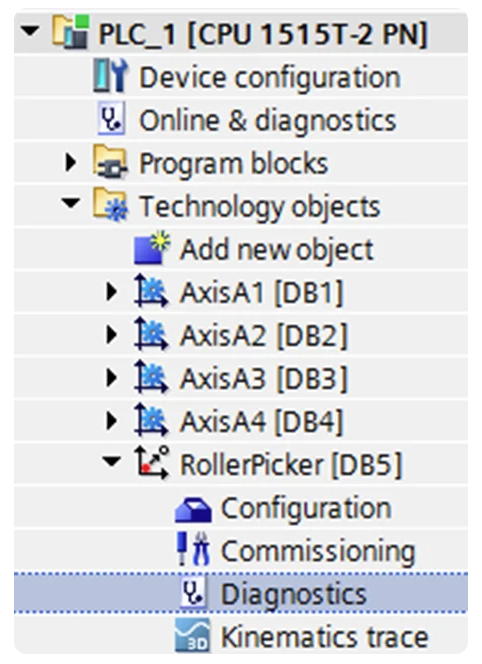
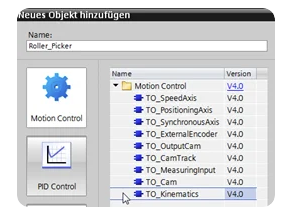
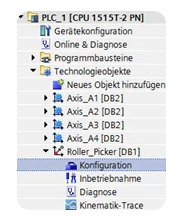
1. TO "Кинематика" может быть создан как новый технологический объект.
2. Для портала с захватом 3D с осью ориентации потребуется один TO "Кинематика" и четыре позиционируемые оси
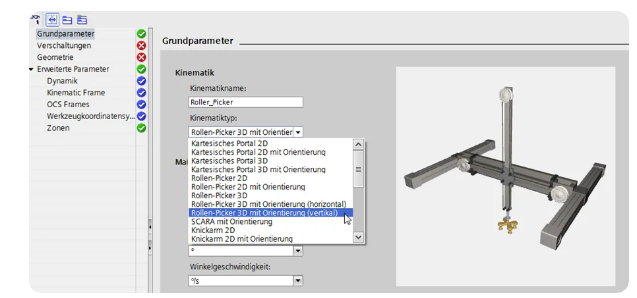
3. В конфигурации выбирается соответствующий тип кинематики.
4. Позиционируемые оси согласуются с кинематикой
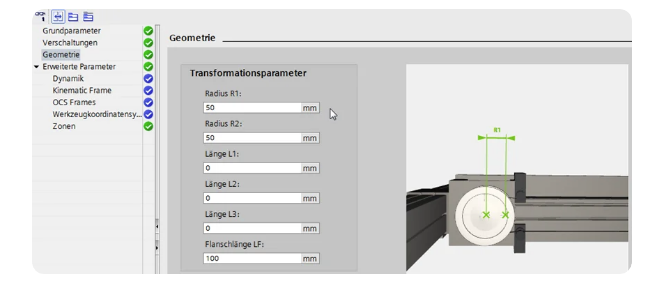
5. Выполняется параметрирование геометрии кинематики.
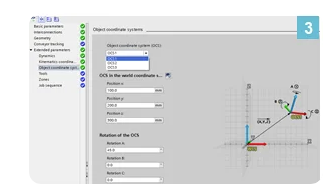
Предварительная настройка динамики, зон, систем координат, инструментов
1. Для динамической характеристики ориентации траектории могут быть заданы значения по умолчанию и предельные параметры
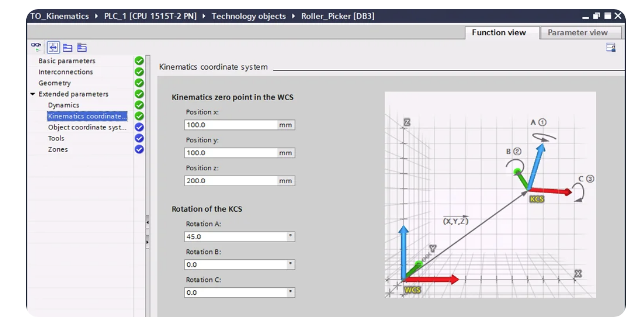
2. Допускается смещение и вращение кинематики в системе координат
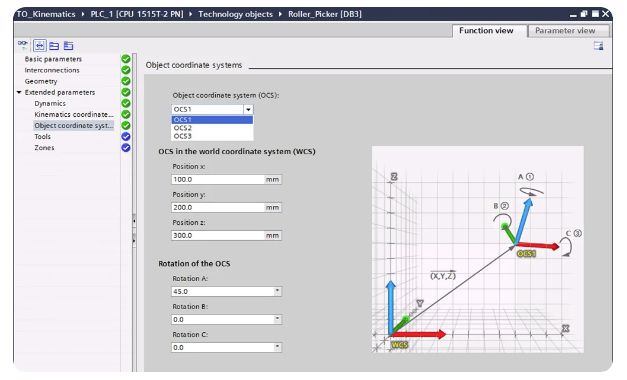
3. Может быть настроено до трех систем координат объекта
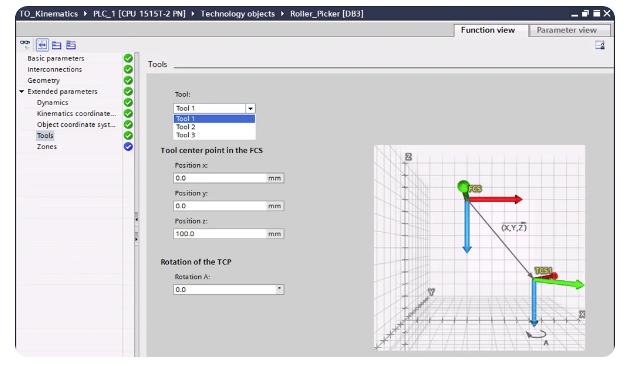
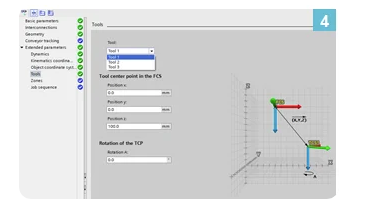
4. Может быть настроено до трех инструментов
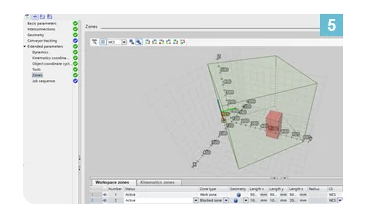
5. Трехмерная визуализация для процесса настройки зон
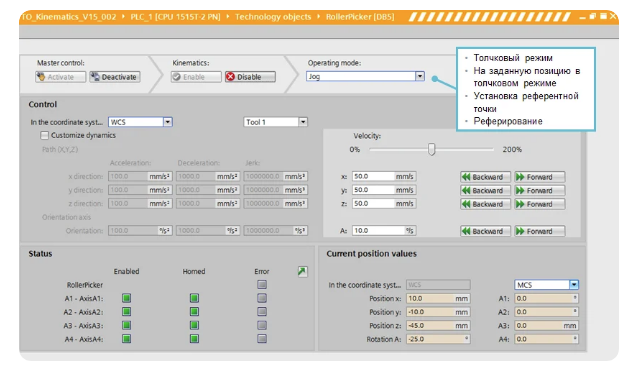
Ввод в эксплуатацию с помощью панели управления
• Удобно: Работа от кнопок и реферирование кинематики на одной панели управления
• Ручное перемещение осей кинематической системы с учетом системы координат и инструмента
• 3D визуализация движения в Трассировке кинематики
Программирование с функциональными блоками
PLCopen
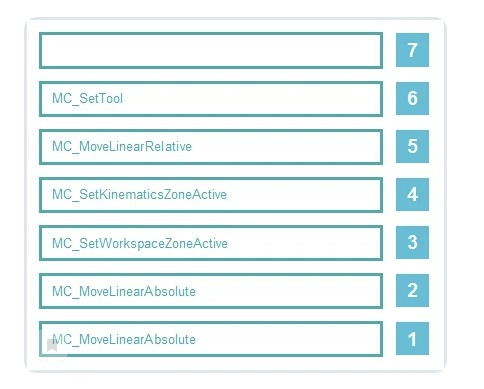
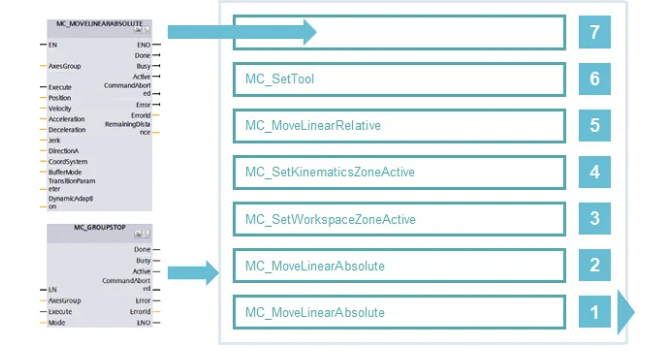
Команды записываются и выполняются по очереди. Динамика планируется по всей цепочке команд. Цепочка может содержать до десяти команд. Число команд в цепочке отображается в TO "Кинематика" (TO-DB).
С помощью MC_GroupInterrupt, MC_GroupContinue, MC_GroupStop можно прервать, продолжить или отменить обработку последовательности команд
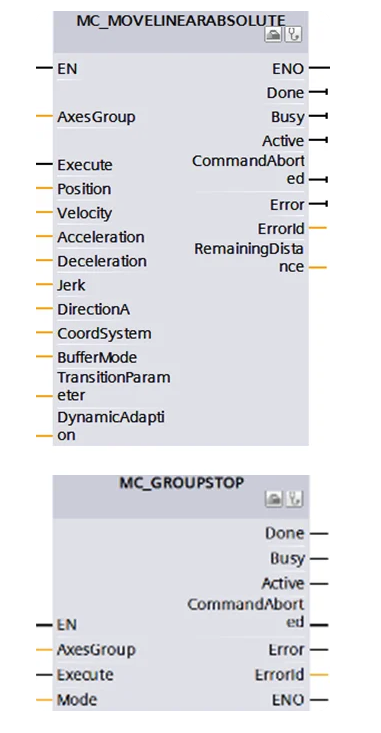
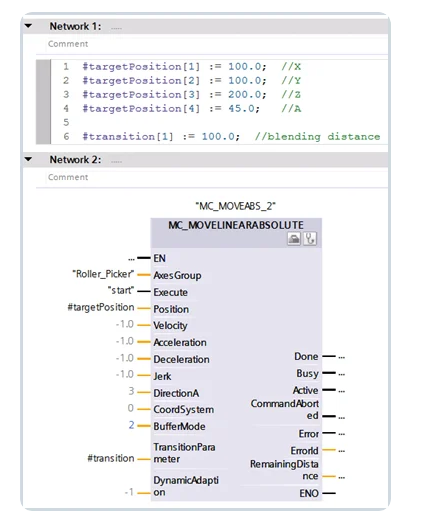
Пример параметрирования: MC_MoveLinearAbsolute
• Заданная позиция определена как массив из четырех значений LREAL
• Значение в „transition[1]“ это интервал скругления к предыдущей операции движения
• Вход “Execute” запускает операцию движения для группы осей (TO "Кинематика")
• Динамика может установлена непосредственно на операторе. При входном значении „-1“ используются установки по умолчанию
• Направление движения декартовой ориентации, а также система координат (система координат пространства, система координат объекта) заданной позиции, могут устанавливаться непосредственно командой
• Остаточный путь “RemainingDistance” движения доступен как выход блока
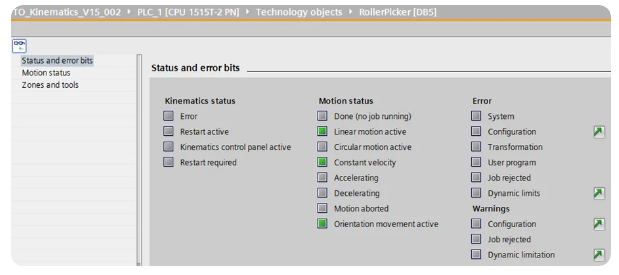
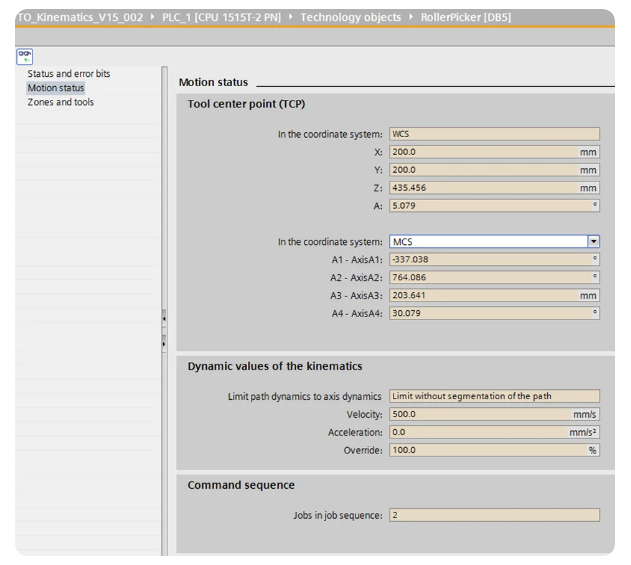
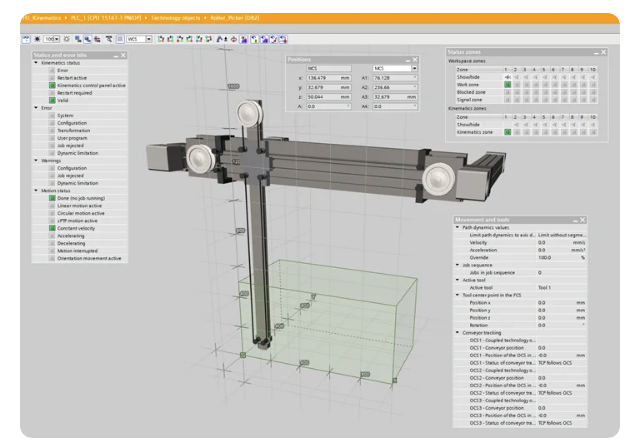
Обширные функции диагностики:
Интегрированная в TIA Portal интерактивная диагностика TO "Кинематика"
• биты состояния и ошибок
• состояние движения
• состояние зон и инструментов
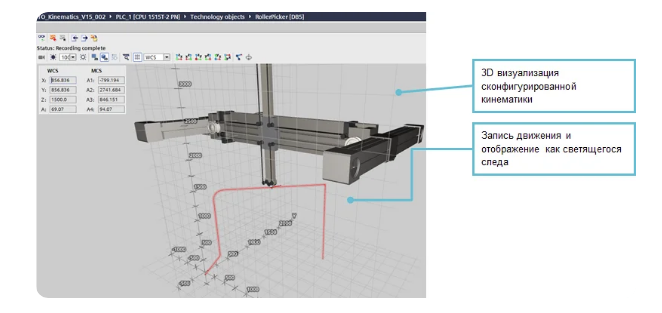
Трассировка кинематики – 3D визуализация и запись движений
3D визуализация сконфигурированной кинематики, запись движения и отображение светящимся следом.
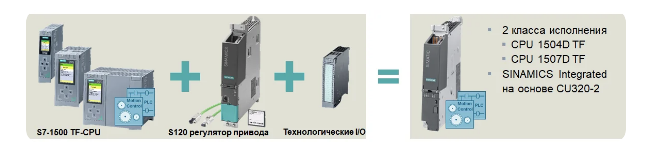
Обзор контроллера SIMATIC S7-1500D с CU SINAMICS S120 :
Обновление 09.12.21
Основные преимущества:
Ультракомпактный дизайн
• S7-1500 TF-CPU и регулятор привода SINAMICS S120 в одном устройстве
• Не требуется дополнительного места для PLC
Производительность
• Мощный TF-CPU со встроенным регулятором привода SINAMICS S120
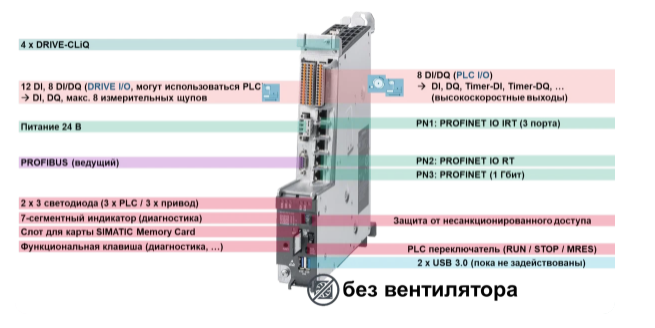
• Наличие всех необходимых компонентов: памяти, интерфейсов и технологических входов-выходов
Простое масштабирование
• Одинаковые интерфейсы у всех классов исполнения (CPU 1504D TF / CPU 1507D TF)
• Возможность подключения дополнительных приводных систем (например, SINAMICS S120, S210) через PROFINET
Выбор для производственных машин
• Мощность для технически-сложных задач
• F-CPU и интегрированные в привод функции обеспечения безопасности для защиты персонала и оборудования
• Наличие всех необходимых интерфейсов, технологических входов/выходов и запоминающих устройств
• Высокоскоростные выходы с минимальной задержкой и высочайшей точностью коммутации, например, для кулачков
Дополнительные функции управления перемещением с TIA Portal V16 FW V2.8 CPU 1504D TF и CPU 1507D TF по сравнению с CPU 1500. :
*SIMATIC S7-1500D выполнен в виде модуля управления книжного формата SINAMICS S120
Расширенные функции управления перемещением
• Кинематические функции
• Управление кинематическими системами максимально с 4 интерполируемыми осями
• Синхронный редуктор и кулачковый синхронный ход
• С задачей синхронной позиции ведущей и ведомой оси
• Соединение по заданному значению
• Соединение по фактическому значению с экстраполяцией
• Синхронизация движения между PLC
• Синхронизация осей на различных CPU
• SIMATIC Safe Kinematics V1.0
• Опциональная платная системная библиотека для безопасного мониторинга движений в декартовом пространстве
Встроенные программы для редактирования и просмотра
• Редактор кулачков
• Конфигуратор для кинематики
• Трассировка кинематики
• Координация трассировок по нескольким CPU
Веб-сервер
• Диагностические страницы для управления перемещением
Дополнительные функции управления перемещением с TIA Portal TIA Portal V17 / FW V2.9
Новая прошивка: PLC FW V2.9 и SINAMICS Integrated FW V5.2 SP3
• Дополнительные функции см. PLC FW V2.9 и SINAMICS S120 FW V5.2 SP3
• Независимое внесение изменений в PLC и SINAMICS FW
Расширенные функции SINAMICS Integrated:
• DCC/DCB - свободные регулирующие, вычислительные и логические блоки для расширения функций привода; напр., для изменения/настройки канала заданных значений регулятора в очень быстром цикле
• EPos - реализация задач позиционирования непосредственно в приводе
• Дополнительная поддержка лицензий SINAMICS:
- компенсация периодических синхронных моментов
- Advanced Position Control (APC), активное гашение вибраций в приводной системе
- SERVCOUP (Servo Coupling), соединение нескольких модулей двигателя с одним энкодером
- Установка типа карты клавишей FUNCT (без ES и без картридера)
Карта памяти может использоваться как программная и микропрограммная карта; например, для упрощения замены модулей
- CPU 1507D TF: сокращение мин. цикла приложения с 500 до 250 мкс
Увеличение тактовой частоты оборудования, расширение возможностей оборудования для сложных задач управления перемещением
- PLCSIM Advanced с Drive Controller
Реалистичный функциональный тест пользовательской программы для своевременного обнаружения ошибок и проверки функциональности
- Улучшенная эргономика
• Веб-сервер (изменения дизайна; отображается состояние светодиода для привода)
• Встроенное диалоговое окно лицензии: для лучшего обзора отображаются только лицензии технологического расширения SINAMICS, если соответствующее технологическое расширение было установлено в Startdrive.
• Link X142 I/O: улучшенный обзор подключенных TO
• Единая нумерация объектов Drive Controller (PLC, Integrated, группа Drive Controller, …) для лучшей прозрачности
- Инструкция: MC_KinematicsMotionSimulation
Позволяет продолжить движение кинематики после запрета и повторного разрешения кинематических осей.
- Адаптация динамической характеристики на панели управления кинематикой включается через режим работы „Толчковая подача на заданную позицию".
В режиме работы „Толчковая подача на заданную позицию“ панели управления кинематикой "Адаптация динамической характеристики без сегментирования траектории" активна в непрерывном режиме, при этом учитываются динамические ограничения кинематических осей.
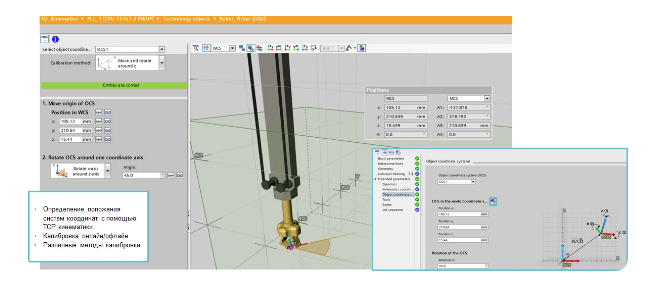
- Офлайн и онлайн калибровка зон рабочего пространства
Удобное определение зон рабочего пространства с графической поддержкой
- Отображение пройденного участка пути и всего пути движений по траектории (линейных, круговых) без слежения за траекторией в переменных
Запуск операций на определенной общей длине траектории в приложениях без слежения за траекторией
- Конфигурирование интервалов округления > 50% коротких участков пути
Более короткие траектории за счет увеличения интервалов округления
- Количество подготовленных команд в последовательности заданий отображается в переменной
Начало кинематического движения после завершения подготовки движения
Добавление технологических CPU в линейку изделий
1. При цикле Servo/IPO 4 мс и загрузке CPU через управление перемещением на 35 %
2. Другие TO не используются
3. Необходимые ресурсы для ТО Motion Control: Регулируемая по скорости ось = 40 | Поз. ось = 80 | Синхр. ось = 160 | Кулачок = 20 | Кулачковая траектория = 160 | Измерит. щуп = 40
4. Необходимые ресурсы для ТО ExtendedMotion Control: Дисковые кулачки (1.000 точек и 50 сегментов) = 2 | Дисковые кулачки (10.000 точек и 50 сегментов) = 20 | Кинематический объект = 30 | Замещение ведущей оси = 3
5. CPU 1515T/TF: рекомендуется макс. 1 кинематический объект
Оптимизированное для производственных машин привлекательное решение :
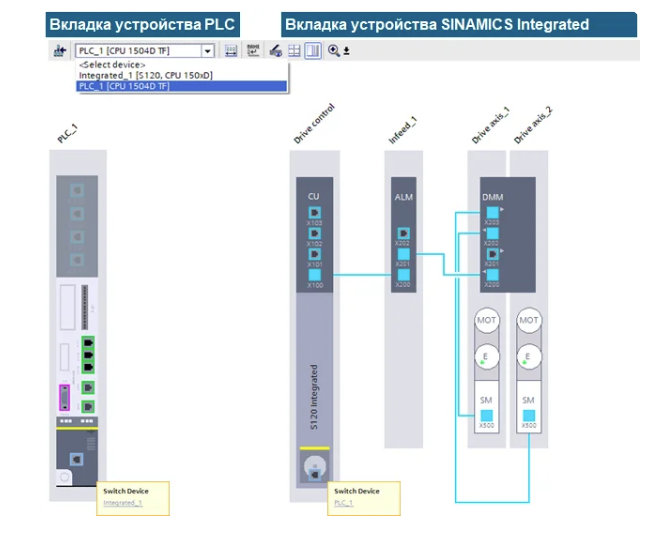
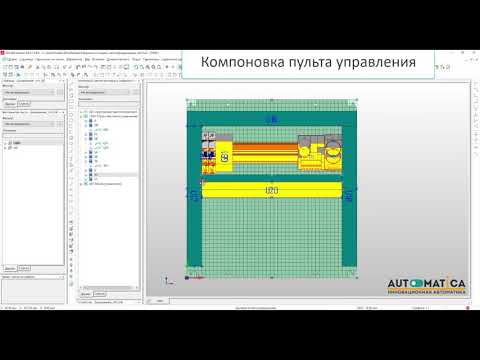
Аппаратная компоновка :
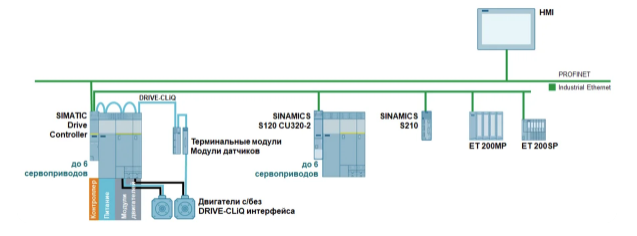
Топология :
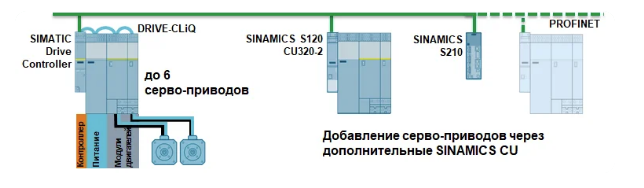
Решение SIMATIC на базе привода состоит из следующих компонентов:
• SIMATIC Drive Controller (со встроенным регулятором привода SINAMICS S120 на базе CU320 (Часть функций (без EPOS/DCC/…), без CX32-2 как у SIMOTION D4x5-2)
• Компоненты SINAMICS S120 (устройство питания, силовые части и т. д.)
• DRIVE-CLiQ коммуникация, терминальные модули, модули датчиков, ...
В случае более 6 сервоприводов можно использовать другую компоновку, например, SINAMICS S120 CU320-2, SINAMICS S210, … 2)
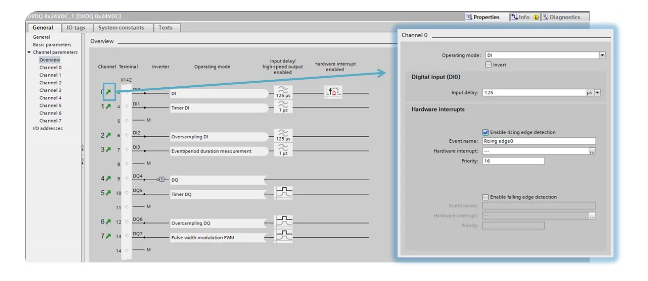
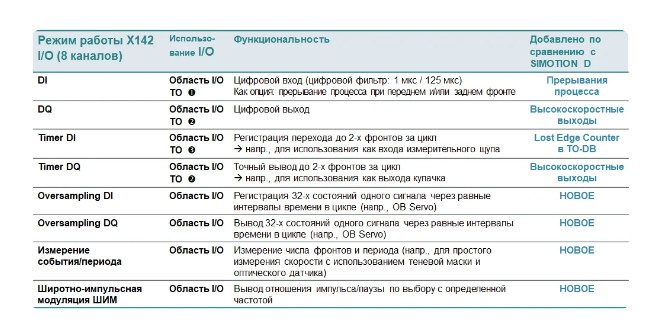
Технологические входы-выходы
Проектирование
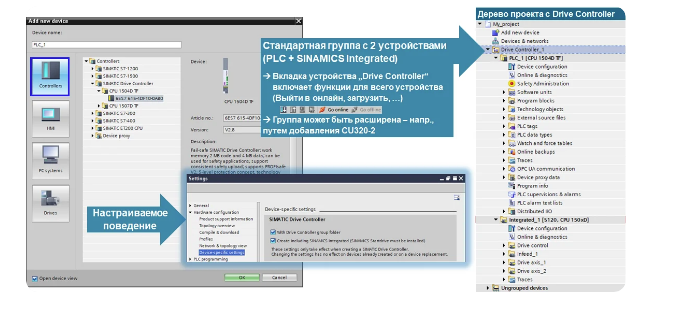
Добавление устройства в окне портала / дереве проекта :
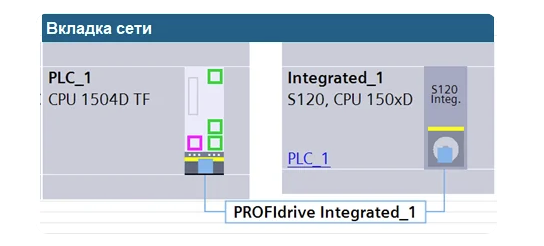
Вкладка сети и устройства :
Предустановки упрощают проектирование
• SINAMICS Integrated всегда в изохронном режиме à настройки не требуются
• Телеграммы привода предустанавливаются -> CU: 393 / питание: 370 / привод: 105
• При соединении осевых TO с приводом в качестве образа процесса автоматически устанавливается „PIP OB Servo“
• Автоматическая синхронизация времени между CPU и SINAMICS Integrated / CU3x0-2 по телеграмма 39x
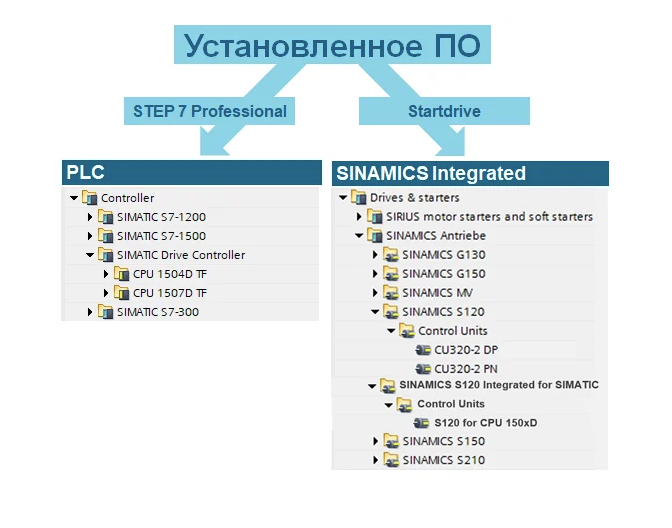
Каталог модулей / Замена устройства :
Преимущества двух ПО
• Настройки на стороне привода выполняются через Startdrive и в равной мере доступны для SINAMICS Integrated и процессоров
• PLC и SINAMICS Integrated могут обрабатываться как отдельные объекты (Copy/Paste/Delete)
• Больше гибкости в навигаторе по проекту: свободное перемещение и формирование групп с PLC и SINAMICS Integrated
• Идентичная обработка „Integrated <-> CU320-2“
• Замена устройства между модульным S7-1500 CPU и SIMATIC Drive Controller (и наоборот) возможна (замена устройства между SINAMICS Integrated и CU320-2 сейчас не поддерживается)
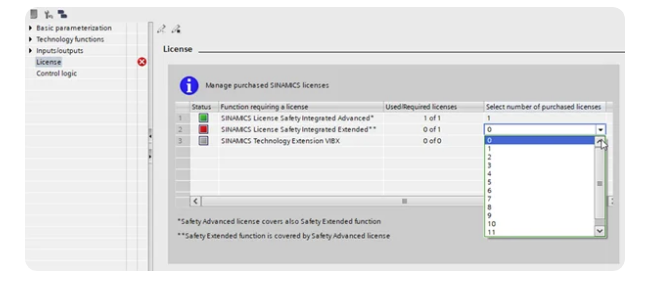
Лицензирование SINAMICS Integrated :
Процесс лицензирования для SINAMICS Integrated аналогичен процессу для соглашений об использовании для SIMATIC.
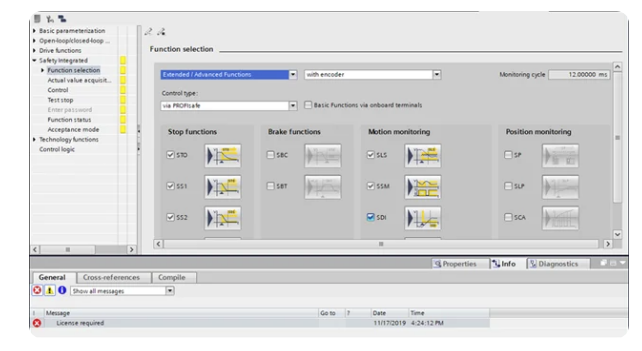
• Выбор функций
• Отображаются необходимые лицензии
• Необходимые лицензии (CoL) приобретаются
• Подтверждение числа приобретенных лицензий в области проектирования
Заказные номера соответствуют таковым у простых лицензий для CU320-2, например, Safety Integrated Extended Functions Заказной номер: 6SL3074-0AA10-0AA0
Технологические входы-выходы :
Сравнение с SIMOTION D :
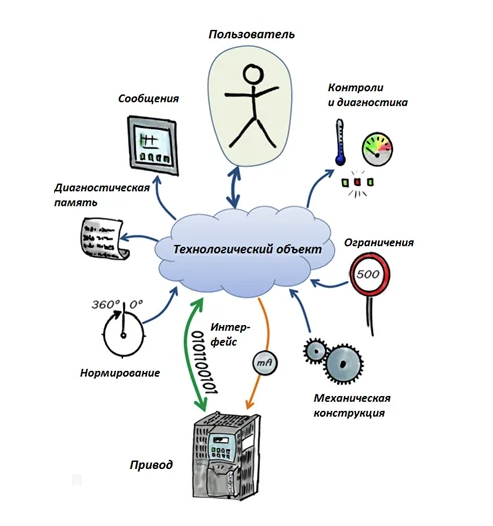
Что такое технологические объекты (ТО)?
Технологические объекты для управления перемещением
• TO это программные объекты в контроллере
• TO представляют механические компоненты
• TO инкапсулируют технологические функции
• TO имеют единое конфигурирование и параметрирование
• TO обеспечивают унифицированный и простой подход к
управлению перемещением
Как TO интегрирован в систему?
• TO для регулируемой по скорости, позиционирующей и синхронной оси, дискового кулачка, кулачков, кулачковой траектории, измерительного щупа или внешних датчиков
• Блок данных TO содержит все данные конфигурации, заданные/фактические значения и информацию о
состоянии TO
• TO обменивается информацией с приводом и
периферийными устройствами. Адаптация параметров привода выполняется автоматически
• TO управляет приводом или приводной группой
• TO программируются через программу пользователя с помощью команд PLCopen
• Позиционные значения с высоким разрешением (6 знаков после запятой) -> макс. точность при вычислениях в приложении
Функциональность
Типы осей
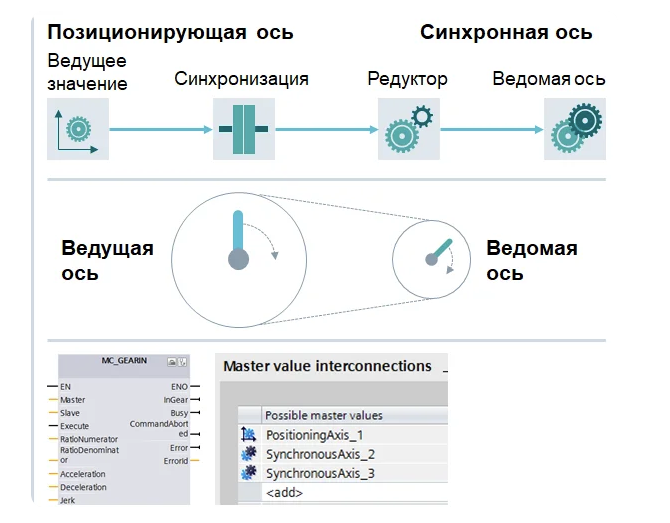
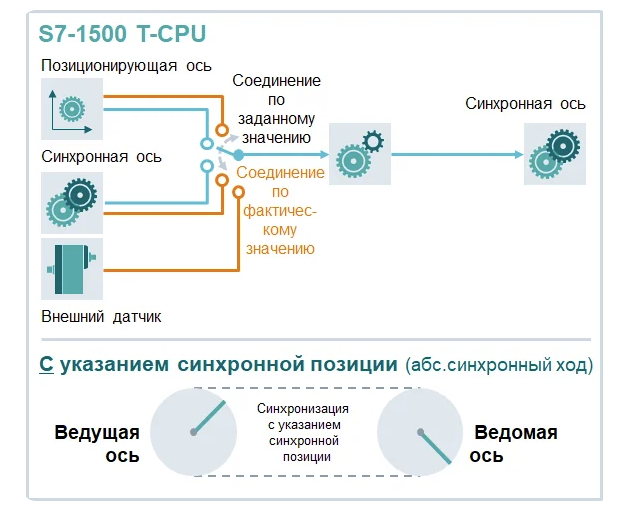
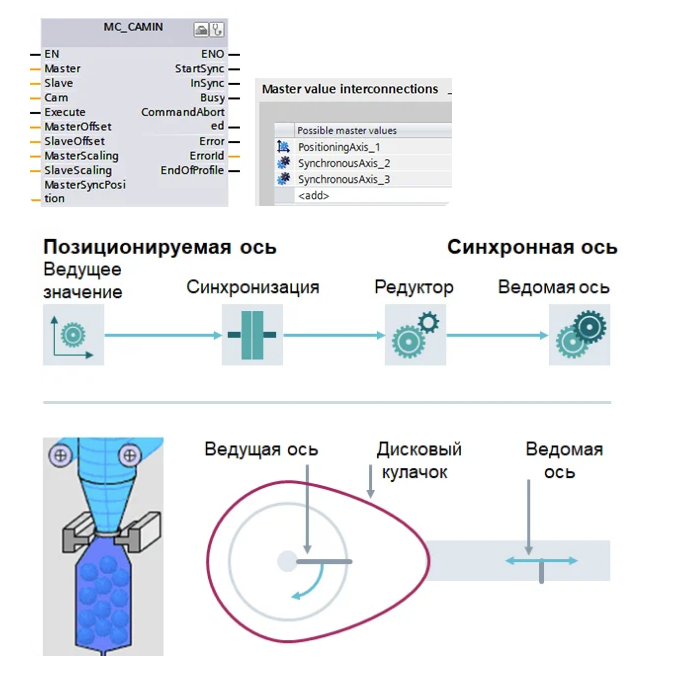
Синхронная ось (синхронный редуктор и кулачковый синхронный ход) :
• TO "Синхронная ось"
• Ведущее значение это
- заданное положение ведущей оси или
- заданное/фактическое положение ведущей оси (только T-CPU) или
- фактическое положение внешнего энкодера (только T-CPU)
• Возможность переключения ведущего значения
• Синхронизация на переменное или стационарное ведущее значение
• Синхронизация без установки синхронной позиции
• Синхронизация с установкой синхронной позиции (только T-CPU)
• Синхронизация согласно установкам по команде
• Возможность изменения передаточного числа по команде
Привод регулирует скорость -> Датчик положения нужен
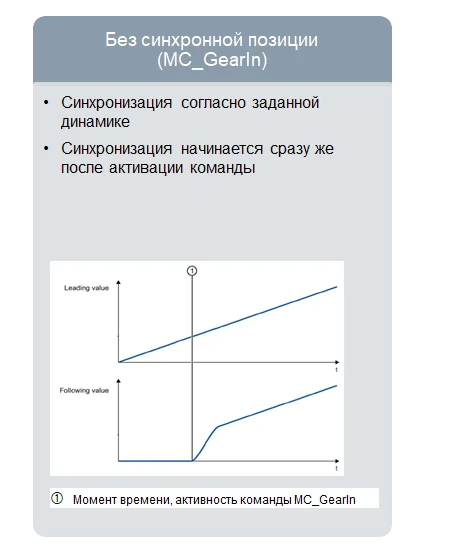
Без указания синхронной позиции "Относительный" синхронный ход
• Синхронизация через MC_GearIn
• При поступлении команды сразу же выполняется синхронизация ведомой оси с заданной динамикой -> Движение с синхронной скоростью и ускорением
• Синхронные позиции получаются при синхронизации и не могут быть определены заранее
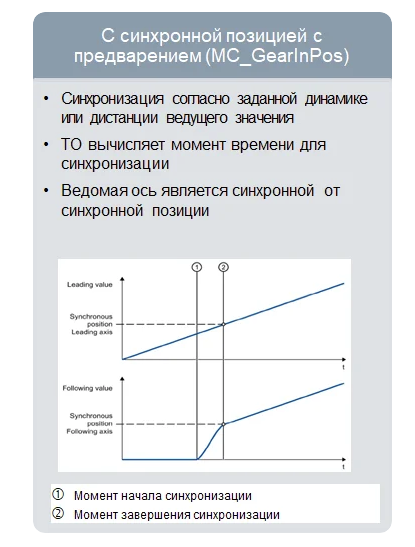
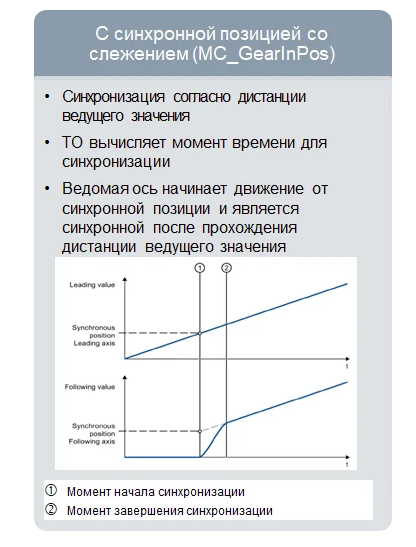
С указанием синхронной позиции Абсолютный синхронный ход (только S7-1500 T-CPU)
• Синхронизация через MC_GearInPos
• Предварительная синхронизация с помощью заданной дистанции ведущего значения или параметра динамики
• Следящая синхронизация с помощью заданной дистанции ведущего значения
• При поступлении команды TO самостоятельно определяет начало синхронизации, чтобы выдержать заданные критерии.
Синхронная ось – Синхронизация :
Сравнение функций синхронного хода между S7-1500 и S7-1500 T-CPU :
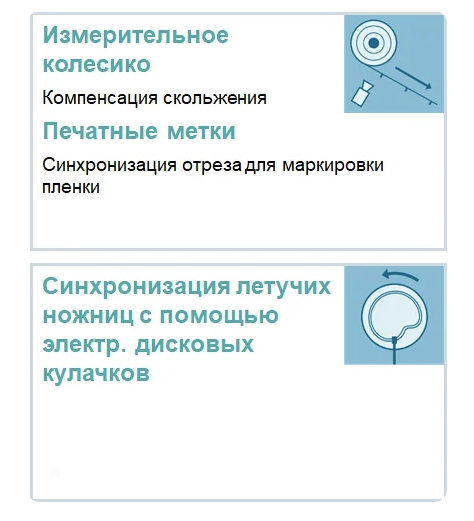
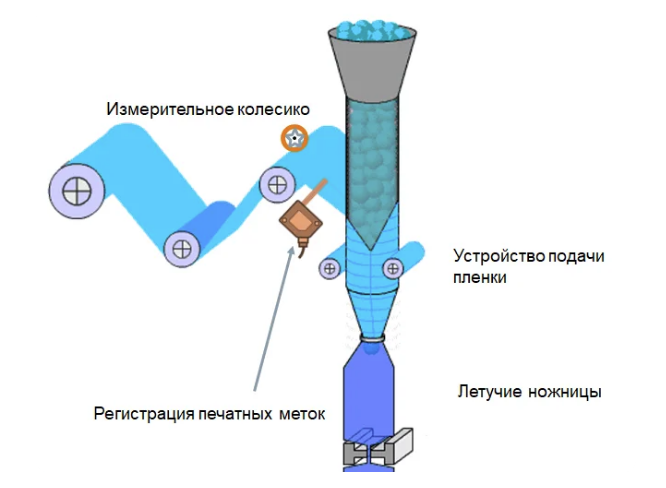
Функции синхронного хода на примере формовочно-упаковочной машины :
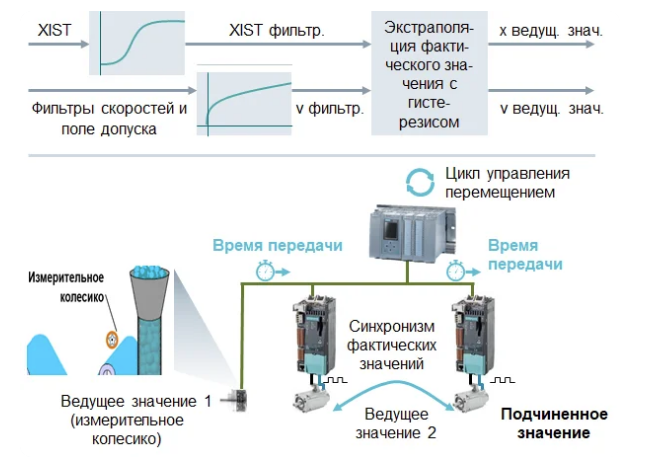
Синхронный ход с соединением по фактическому значению ‒ Экстраполяция фактического значения
• Экстраполяция фактического значения при соединении по фактическому значению
• Фактическое значение как ведущее значение, напр., для внешнего энкодера или подключения на прекращающую вращение ось при ошибке
• Экстраполяция со стороны ведущего значения для компенсации задержки при обработке фактического значения
• „Следящее“ ведущее значение рассчитывается на основе уже известных значений
• Время экстраполяции имеет обусловленный ведущей и ведомой осью компонент (определяется системой)
• "Демпфирование" значений для экстраполяции через фильтры и поле допуска
Кулачковый синхронный ход
Точный позиционный кулачковый синхронный ход
• TO "Синхронная ось" и TO "Дисковый кулачок"
• Ведущее значение это заданное/фактическое положение ведущей оси или фактическое положение внешнего энкодера
• Возможность переключения ведущего значения
• Синхронизация на ведущее значение
• Синхронизация в соответствии с заданными командами
• Переключение дисковых кулачков на лету
Позиционируемая ось (позиционирование)
Программа пользователя:
• заданная позиция
• реферирование
• наложенное движение
TO формирует рампу разгона и торможения
TO управляет положением
Привод регулирует скорость -> Датчик положения нужен
Регулируемая по скорости ось (перемещение с управлением по скорости)
Программа пользователя:
• заданная скорость
TO формирует рампу разгона и торможения
Привод регулирует скорость -> Датчик положения не нужен
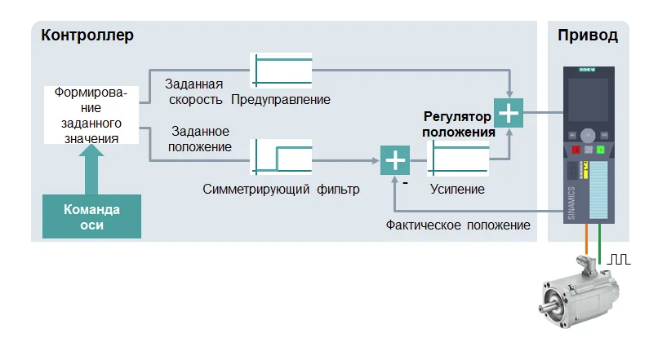
Контур управления ‒ Управление по положению в контроллере :
• Управление по положению в контроллере с тактом сервосистемы (MC-Servo)
• Регулирование скорости и тока в приводе
• Предуправление по скорости минимизирует зависящие от скорости ошибки рассогласования в управления по положению
• Симметрирующий фильтр замедляет заданное значение положения относительно предуправления по скорости
Контур управления ‒ Управление по положению в приводе (DSC) :
• Управление по положению в приводе с активированным DSC
• Регулятор положения с тактом контура управления по скорости (напр., с 125 мкс)
• Возможен значительно более высокий коэффициент усиления регулятора положения Kv и тем самым увеличенная динамика при задающем воздействии и устранении возмущающих воздействий для высокоскоростное приводов
• Возможность более длинных тактов для управления перемещением в контроллере
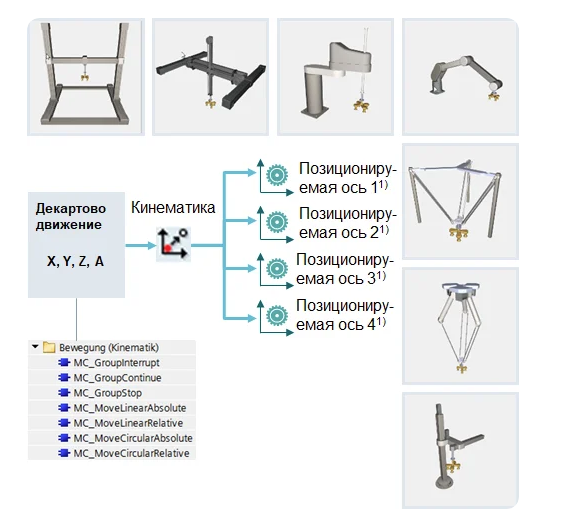
Кинематические функции
До 4 интерполируемых осей в кинематических системах
• TO "Kinematics"
• Готовые кинематические системы (Декартов портал, roller picker, Дельта-робот, SCARA, Шарнирная рука , Станок-трипод, Цилиндрический робот), а также определенные пользователем трансформации для интеграции собственных кинематических систем
• Линейное и круговое движение с управлением ориентацией (напр., вращение захвата) и скруглением
• Синхронное движение точка-точка
• Слежение за конвейером (Conveyor-Tracking)
• Программирование с функциональными блоками (напр., MC_MoveLinearAbsolute)
• Объектные системы координат, системы координат инструмента, контроль зон
• Динамическая адаптация
Ограничение момента и наезд на жесткий упор
Ограничение момента
• Настраиваемое ограничение силы/момента
• Необходима телеграмма 10x
• Настройка эффективности на стороне двигателя или
нагрузки
• Установка единиц в зависимости от типа двигателя
Наезд на жесткий упор
• Подвод с ограниченным моментом
• Обнаружение жесткого упора через ошибку рассогласования
• „Зажим“ с неизменным заданным значением
• Зажимное усилие/момент могут изменяться
• Контроль нарушения или смещения жесткого упора
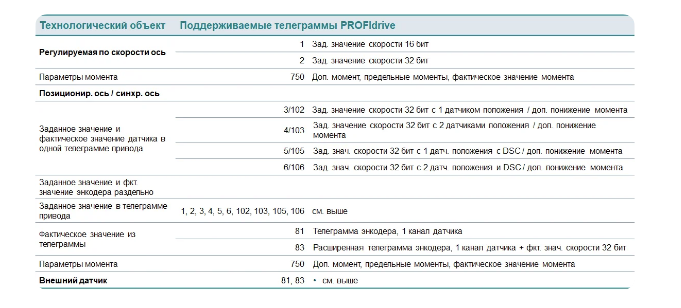
Поддерживаемые телеграммы PROFIdrive :
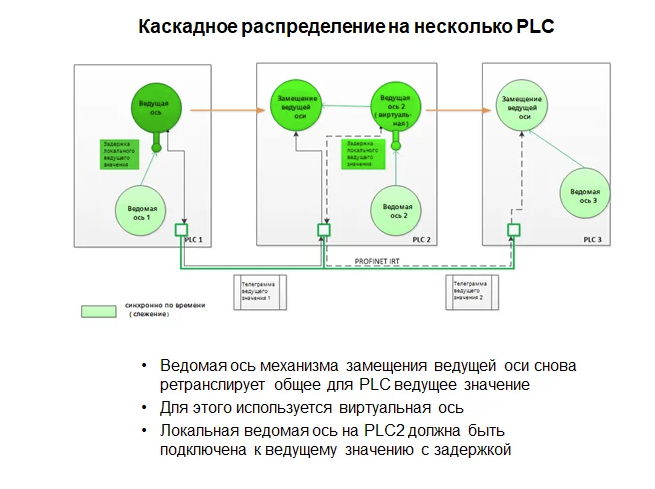
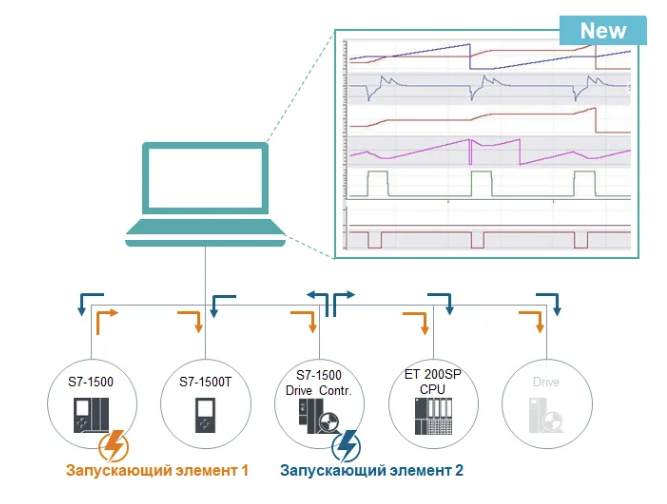
Синхронизация движения между PLC
Плоское и каскадное распределение ведущего значения :
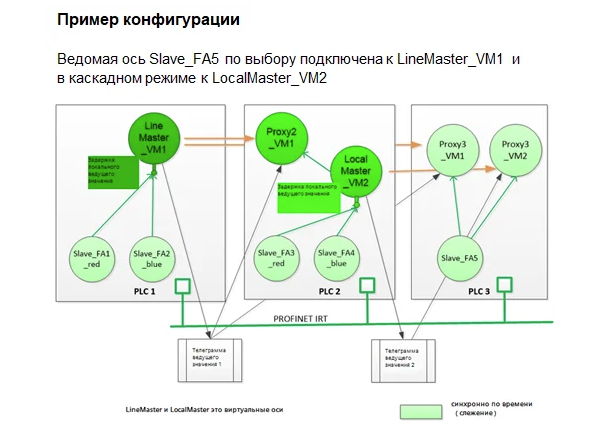
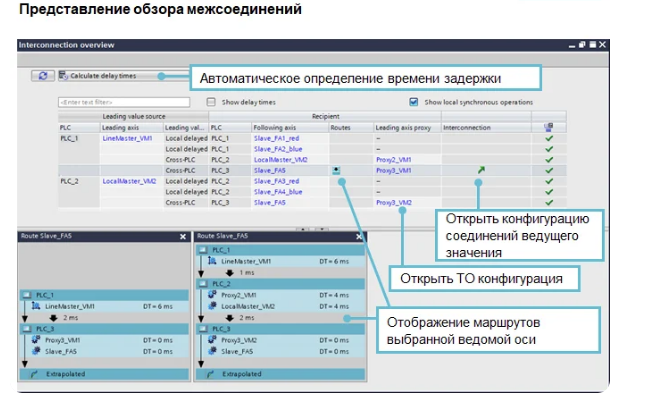
Пример с обзором межсоединений :
• Один проект для всей конфигурации
• Все CPU / устройства в одной PN подсети
• Поддержка разных Servo тактов
• Ведущие и ведомые оси могут быть распределены по разным PLC в произвольном порядке
Трассировка проекта :
• Координация трассировок по нескольким устройствам, поддержка нескольких CPU, поддержка различных типов устройств
• Отображение на общей схеме
• Поддержка разных источников запуска
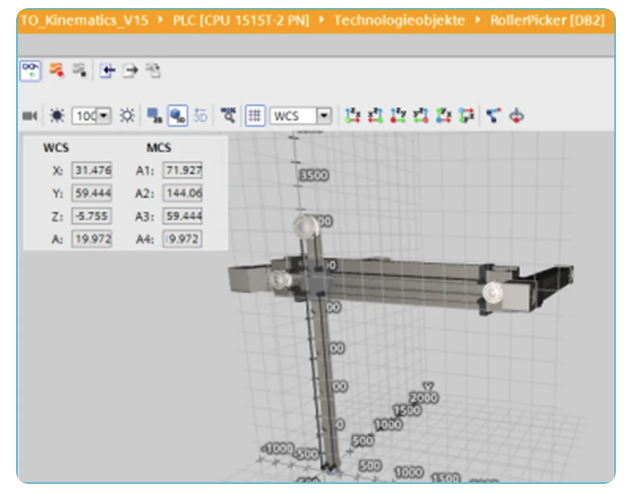
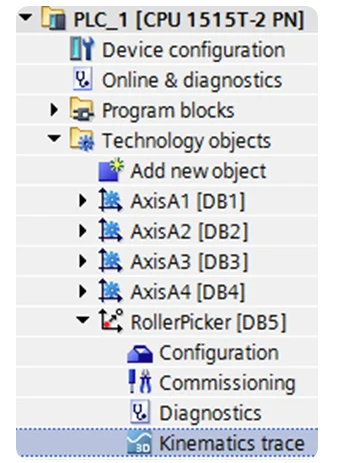
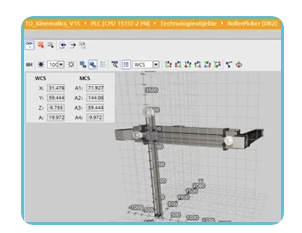
Технологический объект "Kinematics"
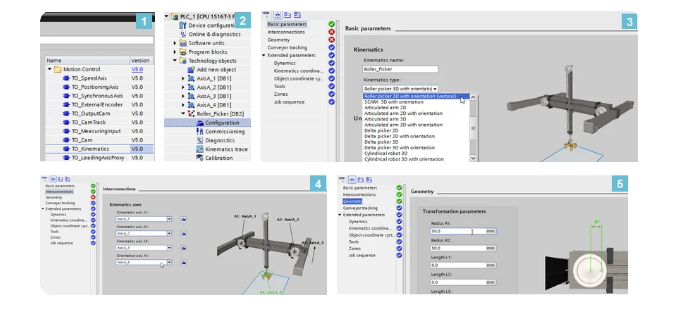
Готовые кинематические системы – Требуется только настройка!
1. TO "Kinematics" может быть создан как новый технологический объект.
2. Для Roller picker 3D с осью ориентации потребуется один TO "Kinematics" и четыре позиционируемые оси.
3. В конфигурации выбирается соответствующий тип кинематики
4. Позиционируемые оси согласуются с кинематикой
5. Выполняется параметрирование геометрии кинематики.
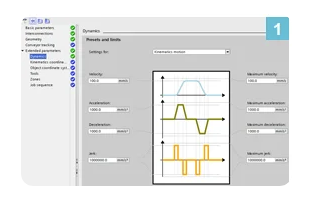
Предварительная настройка динамики, зон, систем координат, инструментов :
1. Для динамической характеристики ориентации и траектории могут быть заданы значения по умолчанию и предельные параметры
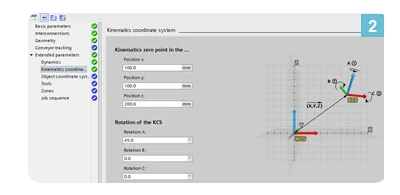
2. Допускается смещение и вращение кинематики в мировой системе координат
3. Может быть настроено до трех объектных систем координат
4. Может быть настроено до трех инструментов
5. Трехмерная визуализация для процесса настройки зон
Ввод в эксплуатацию с помощью панели управления :
• Удобно: Работа от кнопок и реферирование кинематики на одной панели управления
• Ручное перемещение осей кинематической системы с учетом системы координат и инструмента
• 3D визуализация движения в Трассировке кинематики
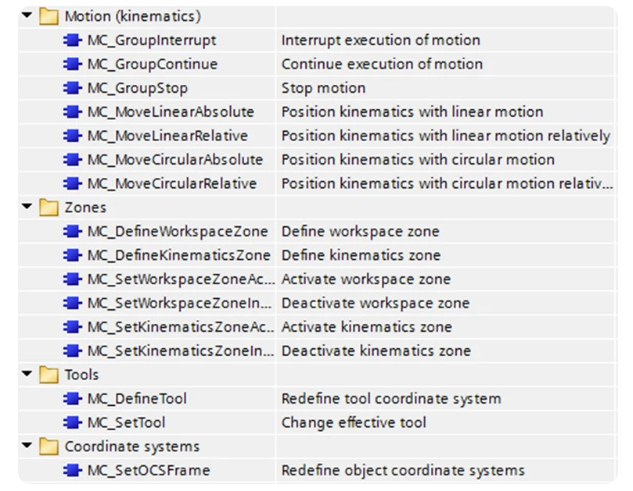
Программирование с функциональными блоками по PLCopen :
Команды записываются в последовательность команд и выполняются. Последовательность команд может содержать до десяти команд. Число команд в последовательности команд отображается в TO "Kinematics" (TO-DB).
С помощью MC_GroupInterrupt, MC_GroupContinue, MC_GroupStop можно прервать, продолжить или отменить обработку последовательности команд.
Синхронное движение „точка-тока“ (sPTP движение) :
Различные диагностические функции :
Помощь при проектировании
Интегрированная в TIA Portal онлайн-диагностика TO "Kinematics"
• биты состояния и ошибок
• состояние движения
• состояние зон и инструмента
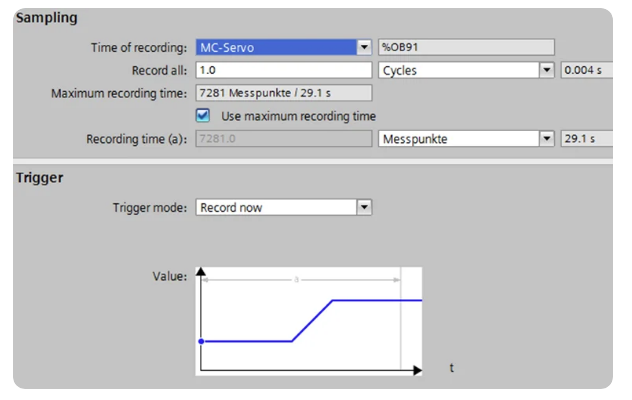
Трассировка кинематики – 3D визуализация и запись движений :
Простая калибровка объектных систем координат :
Данная часть публикации предназначена для представления общего подхода по переходу между поколениями контроллеров от SIMATIC S7-300 к SIMATIC S7-1500.
Само собой разумеется, что существует большое разнообразие вариантов между поколениями контроллеров и рекомендуется отталкиваться от задачи.
Важная информация о жизненном цикле продукта SIMATIC S7-300
По заявлению компании SIEMENS:
• Семейство систем SIMATIC S7-300 / ET 200M являются частью установленного ассортимента продукции и будут доступны, в том числе и как запасная часть до 2023 года.
После объявления о снятии с производства, соответствующий продукт будет доступен в качестве запасной части в течение следующих десяти лет.
• Система S7-1500 дополняет существующие системы S7-300/400. Системы S7-300, S7-400 и S7-1500 в ближайшие годы будут реализовываться параллельно.
• Основное развитие инноваций будет именно в семействах основных контроллеров, работающих с TIA-Portal.
Переход с SIMATIC S7-300 на S7-1500 :
Изменения в линейке продуктов автоматизации :
Линейка SIMATIC S7-1500 :
*) Доп. 50 МБ памяти для функций C/C++ (ODK) / 500 МБ для приложений (Runtime, API)
SIMATIC S7-1500 – Компактный CPU :
Существует также некоторая возможность для перехода от S7 312C на SIMATIC S7 1215C :
Возможность для перехода от S7-313C на
SIMATIC S7 1511C-1 PN :
2 -я возможность для перехода от S7 313C на
SIMATIC S7 1511C-1 PN :
Возможность для перехода от S7 314C-2 на
SIMATIC S7 1512C-1 PN :
SIMATIC S7-1500 – стандартные (и отказобезопасные ) CPU :
Возможность для перехода от S7 312/314 на
SIMATIC S7 1511(F)-1 PN :
Возможность для перехода от S7 315(F)-2 DP на
SIMATIC S7 1513(F)-1 PN и:
Возможность для перехода от S7 315(F)-2 PN/DP на
SIMATIC S7 1515(F)-2 PN :
Возможность для перехода от S7 317(F)-2 на
SIMATIC S7 1516(F)-3 PN/DP :
Возможность для перехода от S7 319(F)-3
на SIMATIC S7 1517(F)-3 PN/DP :
Децентрализованный контроллер
SIMATIC ET 200SP CPU :
Возможность для перехода от ET200S IM151-7(F) на SIMATIC ET 200SP CPU 1510SP(F)-1 PN :
Возможность для перехода от ET200S IM151-8(F) на SIMATIC ET 200SP CPU 1512SP(F)-1 PN :
- 109478811_GuideForMigration_S7-300_S7-1500_ru_COMPRESS.pdf
- 78028908_SIMATIC_Comm_DOKU_v21_ru.pdf
- s71500_analog_value_processing_manual_rus.pdf
- s71500_cm_ptp_function_manual_(A5E03923059-01)_RU.pdf
- s7_1500_сравнение команд.pdf
- S7-1200 S7-1500 PID-регулятор.pdf
- S7-1500 CPU 1511-1.pdf
- S7-1500 CPU 1512c-1.pdf
- S7-1500 CPU 1518-4.pdf
- S7-1500, ET 200MP, ET 200SP, ET 200AL Диагностика.pdf
- S7-1500 Время цикла и время реакции системы.pdf
- S7-1500 Структура и использование памяти CPU.pdf








.JPG)


.jpg)




.jpg)

.JPG)



.JPG)